

Crypto-Robotics Funnel

Robotics is evolving faster than our ability to categorize it. As crypto, AI, and hardware converge, the field has started to look more like a tangled ecosystem than a clean vertical. Without a framework, it’s hard to tell where progress is really happening, and where the gaps still are.
Intro: Why Visualize Robotics as a Funnel
When people think of robotics, they usually imagine the end product: humanoids walking, drones flying, robotic arms building cars. It’s the visible side of robotics, where the hidden intelligence shows up as movement.
But robotics isn’t one simple product; it’s a mix of systems that depend on each other. Before a robot can move, it has to learn from data, build an understanding of its environment, and translate that knowledge into precise physical actions. Each of those steps is its own field, with its own builders, technologies, and challenges.
The crypto-robotics funnel helps make sense of that complexity. It doesn’t show a step-by-step process but groups projects by what part of robotics they tackle: how robots learn, plan, perceive, and act. Seeing the field this way turns a scattered set of projects into a structured ecosystem, where each layer solves a different problem and contributes to the larger goal of making intelligent machines real.
Understanding the Funnel’s Logic
It’s easy to look at a “stack” diagram and assume that information literally flows from one company to another, like a supply chain. That’s not what this funnel shows.
The crypto-robotics funnel isn’t about who hands data or hardware to whom. It’s a map of focus areas: different categories of work that make up the robotics world. Each layer represents a stage of capability, not a step in a process.
The point of the funnel isn’t to box anyone in; it’s to help us see what kind of problem a project is trying to solve.
Now that we’ve defined how the funnel works, we can look at each layer more closely, starting from the top.
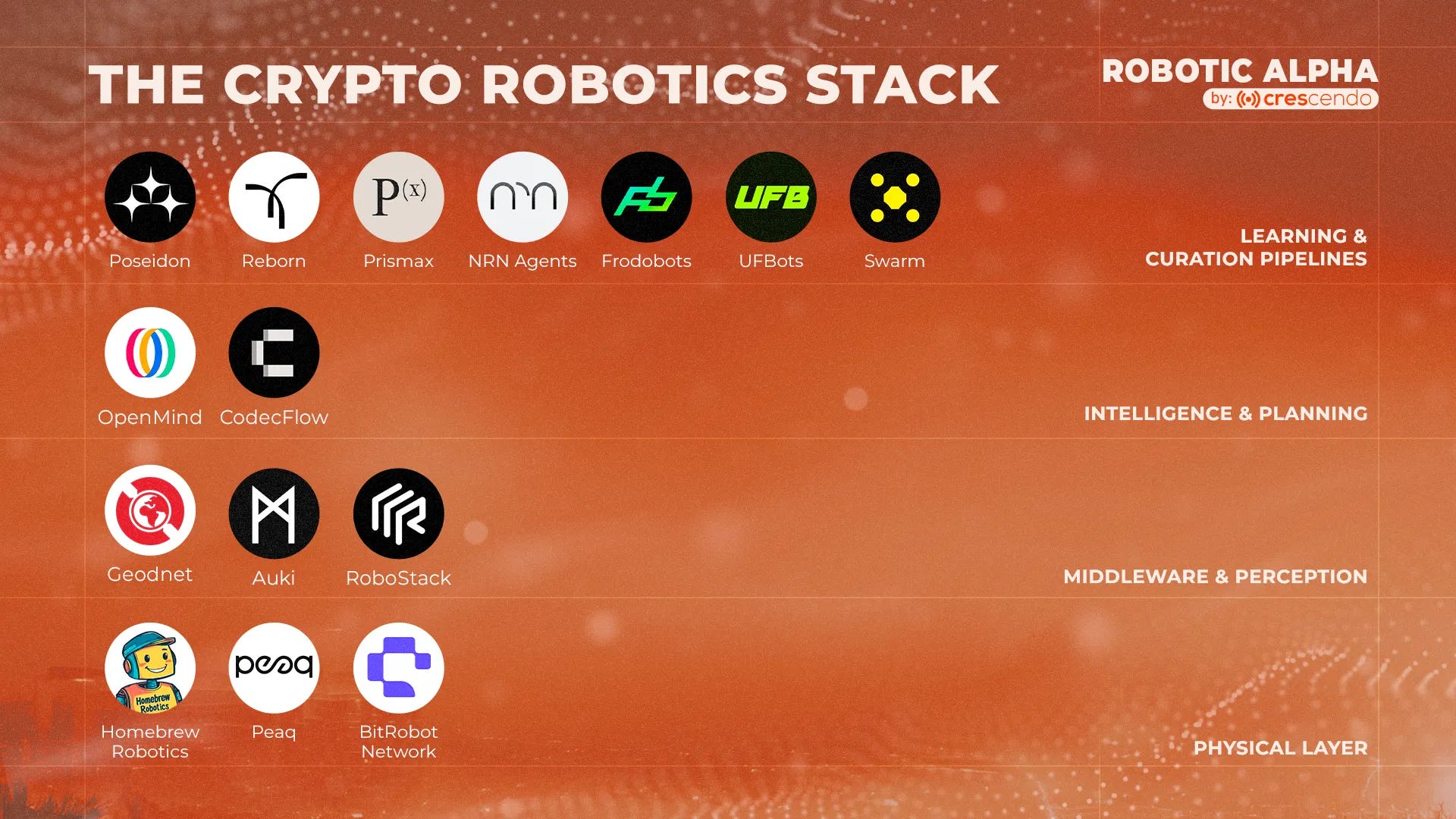
Learning & Curation Pipelines — How robots get their experience
What this layer is:
This layer is about how robots gain experience, through demonstrations, teleoperation, simulations, and games that teach them to act. Before a robot can move intelligently, someone has to record those real-world examples and turn them into structured, reusable training data.
Poseidon is building a marketplace for real-world data. Instead of random videos or motion clips floating around the internet, it organizes who supplies data (people, sensors, devices) and who needs it (robot builders). Everything is labeled, licensed, and traceable so companies can legally train on it. In short, Poseidon is trying to make physical-world data something that can be owned, shared, and reused safely, not just “scraped.”
Reborn is focused on human motion. It lets people record themselves performing actions: like lifting, walking, or turning a knob using affordable tools like a phone app, VR headset, or motion-capture suit. Those recordings become training material for robots. What’s clever is that one recording can be adapted to many robot types, so a single human demonstration can teach multiple machines how to move.
PrismaX turns human control into learning fuel. Here, people remotely control robots (through a browser or VR) and get paid as the system records what they do. Each teleoperation session becomes a scored piece of data, showing not just what was done, but how well it was done. Over time, the robot’s AI learns from these sessions until it can take over parts of the task on its own.
NRN Agents makes robot learning competitive and fun. It treats data collection like a game: people train and race robots in simulations, generating massive amounts of behavior data through play. The constant variety and occasional mistakes from human players are actually valuable, because robots learn better when exposed to unpredictable situations.
FrodoBots and UFBots take robot learning out of simulation and into the real world. FrodoBots’ small sidewalk robots navigate city streets, collecting real-world data and performing tasks like deliveries or remote inspections. UFBots, on the other hand, stage humanoid matches that generate complex motion and interaction data from dynamic environments. Together, they create the kind of unpredictable, high-value data no lab can fully replicate: showing how the full stack of robotics, from learning to coordination, performs when tested in real conditions.
Swarm applies the same concept to drones. It’s a network where anyone can help train autonomous flight models. Drones learn in simulation and are tested in the sky, with contributors rewarded when their models perform well across different environments.
TLDR: This is where robots get their “education.” Projects here focus on gathering the raw material that robots learn from: human demonstrations, teleoperated sessions, game simulations, or real-world runs that teach machines how people move and act.
Intelligence & Planning — How robots learn to think and decide
What this layer is:
This is the “brain” layer of robotics: the software that interprets data, plans actions, and controls movement. It focuses on turning what robots have learned into decisions they can execute in the real world.
OpenMind is building what you could call a robot operating system for thinking (OM1). Instead of each robot having its own custom brain, OM1 provides a modular setup for perception (seeing the world), planning (deciding what to do), and control (carrying out movements). The idea is that a skill trained on one robot: like picking up a cup or recognizing a tool, should work on others without starting from scratch. It’s the “common brain” approach: one framework, many bodies. But even shared intelligence needs a way to stay connected: that’s where FABRIC comes in. It acts as the coordination and memory layer, a shared notebook where robots can record what they’ve done, confirm outcomes, and learn from each other. FABRIC gives robots identity, history, and a way to collaborate across teams or owners without depending on a single central system.
CodecFlow focuses on the missing bridge between reasoning and doing. Large language models (like ChatGPT) can explain tasks very well, but they can’t press buttons, move arms, or interact with physical systems. CodecFlow’s “Operators” solve that by giving AI agents the ability to act, whether it’s controlling a robot arm, operating an app, or running a simulation. It’s like turning a smart planner into someone who can actually pick up a wrench and start fixing.
TLDR: This is where robots learn to “think.” These projects build the decision-making and control systems that turn that learning into useful behavior: the logic, reasoning, and planning that tell a robot what to do next.
Middleware & Perception — How robots understand and stay connected
What this layer is:
This layer gives robots a shared sense of reality: maps, location data, identity, and communication systems that keep them aligned. It allows different robots and AI agents to know where they are, understand their environment, and coordinate without confusion.
GEODNET focuses on precision positioning. Standard GPS can tell you roughly which street you’re on: good enough for humans, but far too vague for robots or drones. GEODNET fixes that by running a decentralized network of small base stations that boost GPS accuracy down to just a few centimeters. Robots can now know exactly where they are, anywhere on Earth.
Auki is building Posemesh, a shared digital map of the world. It lets devices, from AR headsets to robots, exchange spatial data directly, creating a collective understanding of where things are. Unlike GPS, which only gives rough coordinates, Posemesh builds a detailed, real-time 3D map that’s owned by everyone, not a single company. This allows machines to coordinate in the same physical space without confusion or privacy risk.
RoboStack builds the communication layer that connects robot brains to their bodies. Its Robot Context Protocol acts as a universal translator, turning high-level commands into precise motor and sensor actions. By standardizing how data moves between systems, RoboStack keeps different robots and AI modules speaking the same language in real time.
TLDR: This is where robots “understand and communicate.” This layer covers maps, location tracking, shared vision, and the communication systems that let multiple robots or AI agents work in the same space without confusion.
Physical Layer — Where robots meet the real world
What this layer is:
This is the physical (tangible) side of robotics: the robots, hardware, and logistics that turn intelligence into real-world action. It also covers the economic systems that let machines operate and sustain themselves beyond the lab.
Homebrew Robotics is about democratizing robot hardware. Think of it as the “open-source robotics club,” a community working to make humanoid robots affordable and customizable. Instead of one company owning all the hardware, Homebrew builds modular robot kits and a marketplace where anyone can share or sell components and software.
Peaq focuses on the economic side of robotics. It’s a blockchain built specifically for machines, giving them digital identities, wallets, and the ability to make small payments. Imagine a future where a delivery robot can automatically pay a charging station for electricity or earn tokens for completing tasks. Peaq provides the infrastructure to make that kind of machine-to-machine economy possible, giving robots a way to participate in financial systems without constant human oversight.
BitRobot Network looks at robotics as an interconnected economy. It links smaller, specialized “subnetworks,” like fleets of drones, data collectors, or training groups under one shared framework. Each subnet can pursue its own goals but still share data, resources, and rewards through the network’s common token system. It’s a bit like having multiple teams building different parts of the same city: each independent, but all connected by roads, power, and shared currency.
TLDR: This is the hardware and deployment side (where ideas become reality): the actual robots, fleets, and networks operating in the real world, along with the systems that handle payments, ownership, and coordination between machines.
Making Sense of the Robotic Stack

The crypto-robotics funnel is a framework for understanding where different kinds of projects sit within the robotics ecosystem. When you look at the field through this structure, a few deeper patterns stand out.
First, progress in robotics doesn’t happen all at once.
Different layers mature at different speeds. Data collection may move fast, but hardware takes time. Expecting everything to evolve together misses how robotics actually grows: piece by piece, layer by layer.
Second, interoperability is where progress compounds.
When projects use shared standards or protocols, improvements in one layer ripple across the rest. A better mapping system or communication protocol can quietly unlock dozens of new robot applications. This is how small technical wins become big systemic gains.
Third, economics are built into embodiment.
Robots that live in the real world have costs: power, maintenance, bandwidth, hardware; and need ways to sustain themselves. Crypto tools like: identity, payments, and on-chain coordination that give robots a way to earn, pay, and keep operating without human micromanagement, come in useful here. A robot that can maintain itself financially is one that can scale. Reproducibility, not scripted one-time demos, is what turns prototypes into sustainable systems.
In a sense, this funnel helps clarify where we actually are in the development curve: what parts of the stack are strong, and which ones still need work. It also highlights a simple truth: progress in robotics isn’t a solo race. The fastest way forward is through shared standards, open collaboration, and systems built to coexist. That’s the foundation of a human-robot economy that’s not just powerful, but trustworthy and open to everyone.
About Conglomerate
Conglomerate is a seasoned content writer and KOL in the crypto x AI x robotics space. Web3 gaming analyst, core contributor at The Core Loop, and pioneer of the onchain gaming hub and Crypto AI Resource Hub.
Book A Call
Curious how robotics, gaming, and AI can drive your next growth wave? Let’s talk. Book a call with Crescendo’s CEO Shash!
great write up
geodnet changed its handle btw is: @GEODNET
auki too: @Auki