

Flying Robots and the Next Layer of the Physical World

Drones have mapped roads, buildings, and terrain with growing precision. But behind every flight is a set of systems that rarely gets attention: how drones know where they are, how they’re trained, how they coordinate, and how their work is trusted. These systems are becoming part of the physical infrastructure that drones, a.k.a. “flying robots”, as used in this article, depend on. It’s time we map the drones.
The easiest way to understand the DePin Drone Infrastructure stack is to think of drones as uncrewed aircraft systems, not standalone gadgets. Human pilots constantly rely on instruments to know position and altitude, charts and situational awareness to understand the environment, training and simulation to respond under pressure, and shared infrastructure like radar and air traffic control to see and avoid other aircraft. Flying is safe not because pilots are perfect, but because the system around them is designed to catch mistakes before they become accidents.
Drones need the same layers, just built into software and networks instead of people. A drone doesn’t just “fly.” It operates on a full stack of invisible infrastructure:
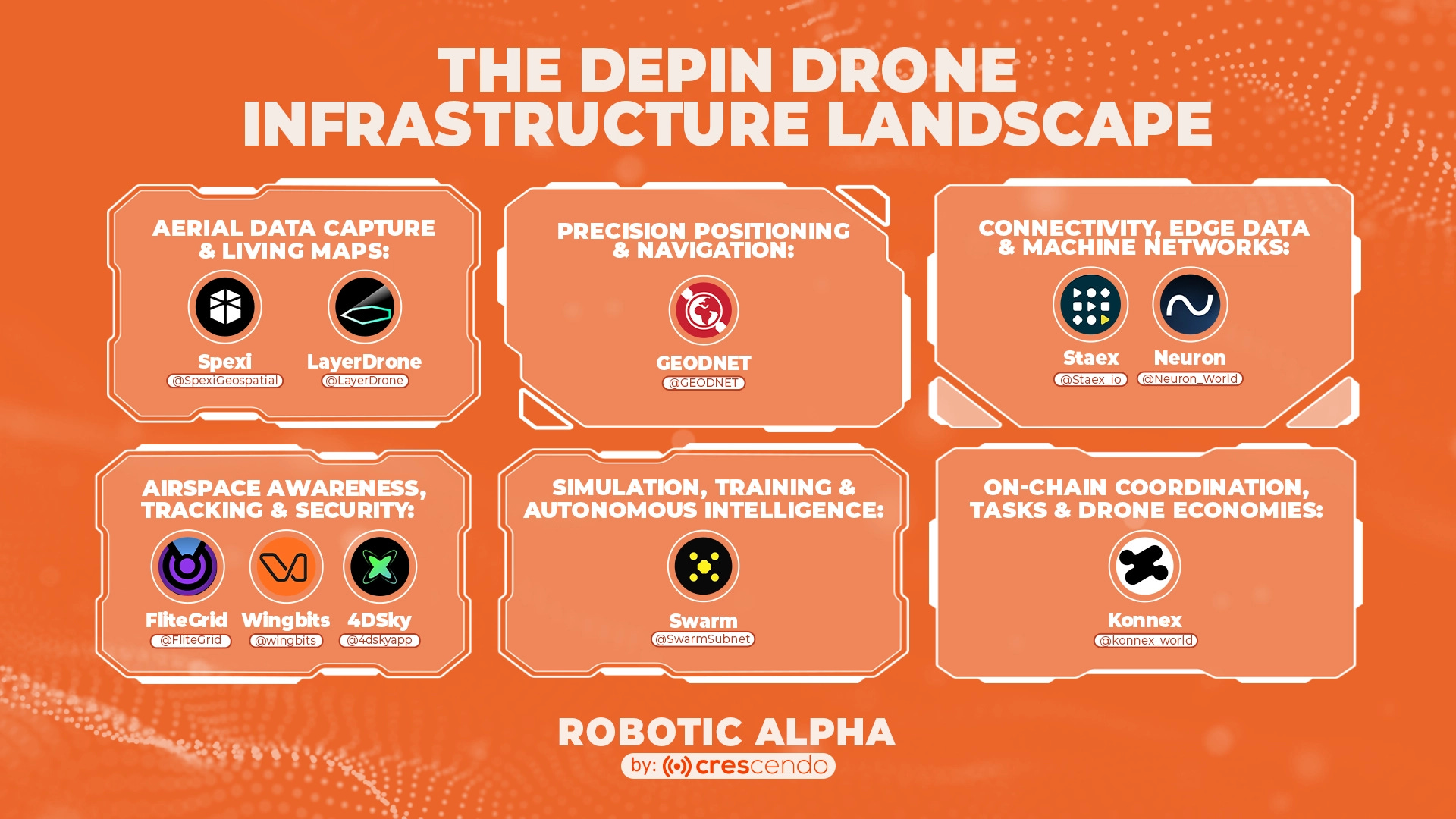
Precision positioning & navigation so the machine knows exactly where it is, not approximately
Aerial data capture & living maps so it understands what the environment looks like and how it’s changing
Simulation and training systems so failure happens before deployment, not during it
Airspace awareness and tracking so it can see other aircraft and drones sharing the sky
Connectivity and edge networks so decisions, telemetry, and coordination don’t break mid-flight
On-chain coordination and economic rails so each flight is authorized, accountable, and economically justified
The drone stack mirrors this exactly, and mapping these layers explains how drones can operate safely at all. The next question is why these layers matter in the first place.
Why We Push Machines Into the Sky
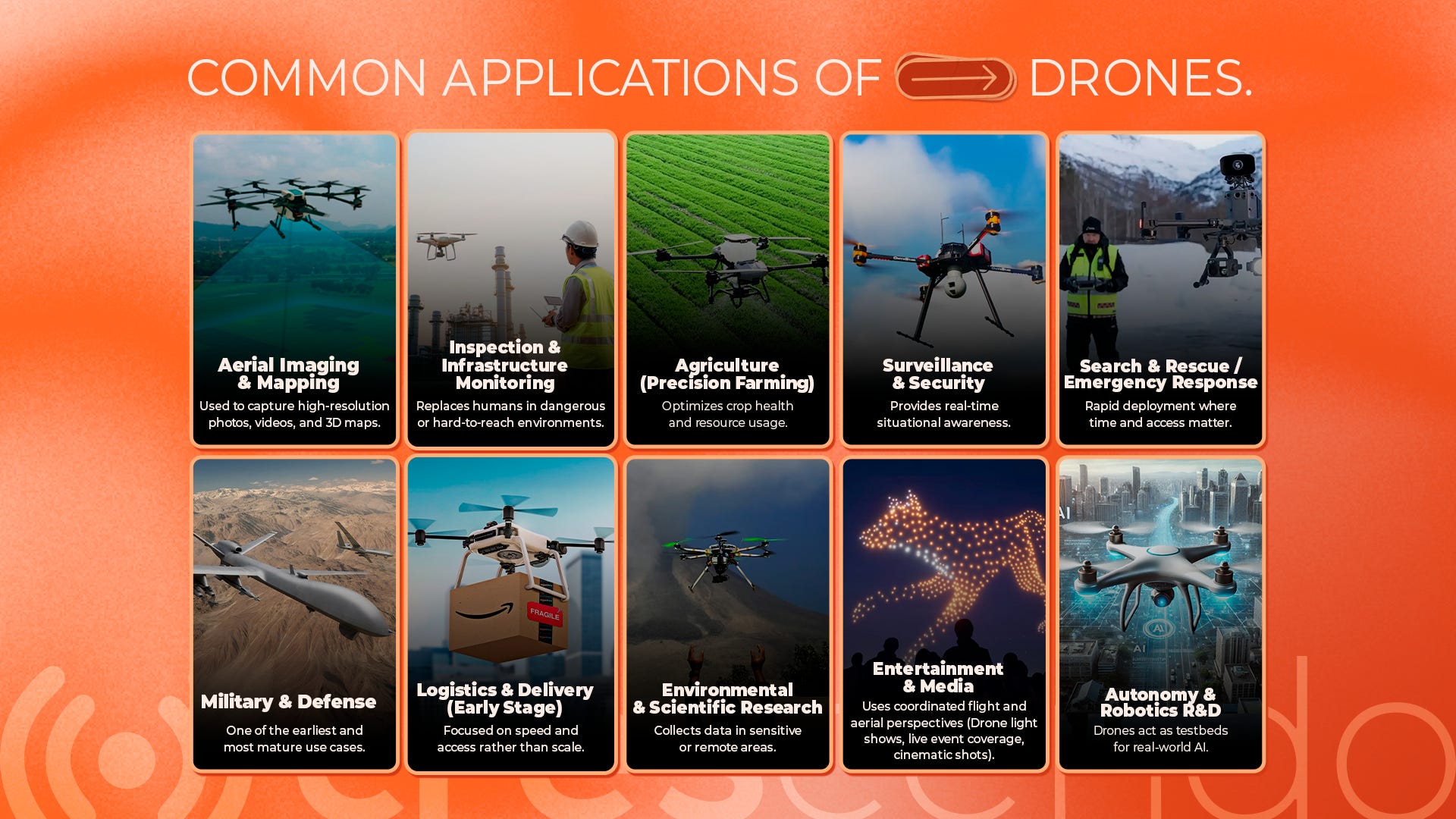
Humans have natural limits in what they can safely do. Some tasks involve constant exposure to risk, extreme environments, or long hours of repetitive work that quickly wear people down. We still see this today, whether it’s firefighters entering unstable buildings, inspectors climbing towers and bridges, or workers sent into toxic or confined spaces. In many of these cases, the real question isn’t whether humans can do the job, but whether they should be the ones doing it at all.
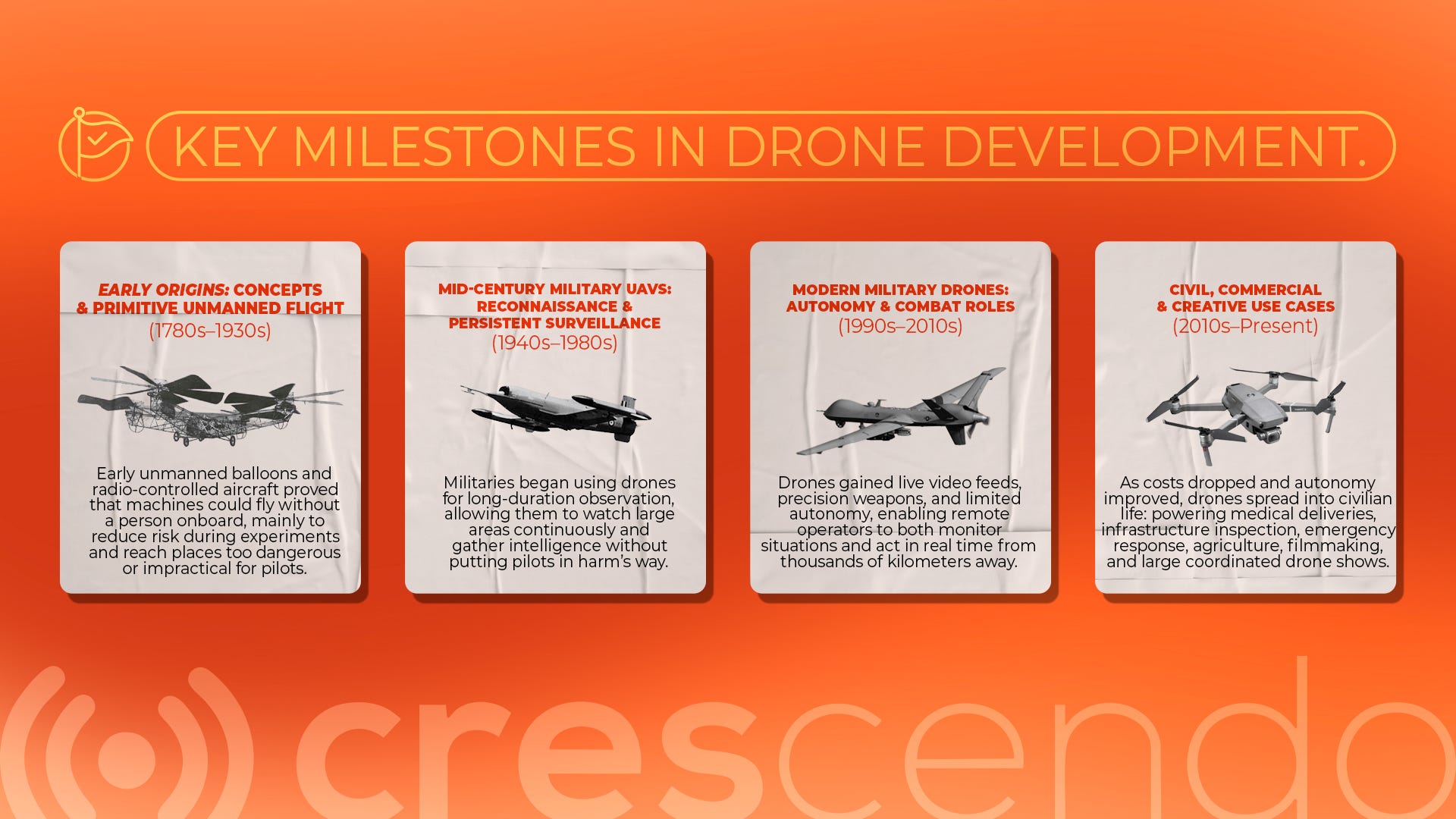
This way of thinking pushed inventors toward the idea of unmanned vehicles: machines designed to take on risk in place of people. One of the first recorded attempts came in 1783, when French inventors Joseph-Michel Montgolfier and Jacques-Étienne Montgolfier launched an unmanned hot air balloon. While it wasn’t a drone in the modern sense, it marked the start of experimenting with flight without a human onboard.
More than a century later, in 1898, Nikola Tesla demonstrated the first radio-controlled vehicle, proving that machines could be operated remotely, without direct human intervention. The approaches are different, but the goal was the same: reduce human risk and reach places people couldn’t safely or easily go.
The Slow Path to Real Capability
Over time, these ideas evolved in small but meaningful steps. Early experiments focused on simply keeping machines airborne, but as aviation matured, balloons became aircraft and mechanical controls gave way to electronics. Manual piloting was gradually supplemented with basic automation, such as self-stabilizing flight and waypoint navigation, which made drones easier to operate and more consistent in performance.
As hardware costs dropped, sensors improved, and onboard computing became more capable, drones could fly longer, operate more precisely, and rely less on constant human input. Each advance expanded what drones could do, but it also made their limits clearer, especially when operating in complex, real-world conditions where precision, autonomy, and reliability still fall short.
Why Intelligence Fails Without Precise Location
Think about what it actually takes for a machine to move through the real world. You can give a vehicle a powerful engine, good suspension, advanced sensors, and even a capable autonomy stack. But all of those systems assume one basic thing is true: the vehicle knows where it is. If that assumption breaks, everything built on top of it starts to degrade.
A vehicle’s most basic job is to move from point A to point B. That sounds simple, but in practice it requires continuous, accurate awareness of position, especially in environments that aren’t clean or predictable. If a system’s understanding of its own location is slightly off, small errors accumulate into real problems: missed turns, poor alignment, unsafe distances, or failed maneuvers.

Autonomy makes this dependency even stronger. When a human is in control, they constantly correct for small errors using intuition and context. Autonomous systems don’t have that luxury. They rely on math, models, and sensor inputs. If the location signal they’re using is noisy or drifting, every decision, no matter how intelligent, rests on unstable ground.
You can train a system to predict outcomes, plan paths, and react to changing conditions. But movement itself is still a physical problem. It depends on geometry, timing, and spatial accuracy. When position estimates drift, obstacle avoidance becomes less reliable, long missions become harder to sustain, and safety margins have to grow larger to compensate.
This becomes especially clear when drones are used in serious, real-world scenarios. If we expect drones to operate in military settings, search-and-rescue missions, disaster response, or other situations where they extend human reach, their sense of position can’t be approximate; it has to be dependable. History shows what happens when it isn’t. Large military UAVs have been lost due to navigation failures; in one case, an Air Force MQ-9 Reaper crashed after multiple GPS and navigation errors caused the autopilot to behave incorrectly during its return to base, resulting in a total loss of the aircraft.

Most of these failures aren’t usually caused by poor human operation. In many documented cases, drone accidents are linked to technical issues: loss of positioning signals, sensor failures, or control system errors. Studies of civilian drone incidents show that technical malfunctions account for a large share of reported crashes, not pilot mistakes.
This example shows that accurate positioning and reliable sensing are still unsolved problems in real-world drone operations. When a drone isn’t sure where it is, the problem isn’t just bad data. It can drift off course, misjudge distances, or switch into unsafe fallback behaviors. If accurate positioning is the limiting factor, then why is this still hard to get right?
The issue isn’t that drones lack sensors or compute. It’s that the underlying location systems they depend on were never designed for machines that need to move precisely, repeatedly, and autonomously in the real world. Fixing this doesn’t come from better AI alone. It requires rethinking how location itself is provided.
GEODNET: Making Location Reliable Enough for Machines
The traditional GPS that we use today works by sending signals from satellites more than 20,000 kilometers above Earth. By the time those signals reach the ground, they’re weak and easily distorted by buildings, terrain, weather, or interference. That’s why standard GPS often drifts by 3–5 meters. If that’s bearable for phones and cars, that’s very crucial for intelligent machines that move around us. A drone that’s off by a few meters misses its landing pad, misaligns its data, or crashes. This is the problem GEODNET set out to solve.
GEODNET is building the world’s largest decentralized RTK (Real-Time Kinematic) network, made up of tens of thousands of ground-based reference stations that continuously correct GPS errors. Many of these stations are run by individuals who install them on rooftops or buildings, contributing to the network and earning rewards in return. The result is centimeter-level positioning that traditional GPS alone simply can’t deliver.
For drones, this matters a lot. GEODNET has partnered with DroneDeploy, the most widely used drone data platform in the world. Survey-grade accuracy used to be possible only with specialized base stations, expensive subscriptions, and experienced operators. That kept adoption limited to a small group of specialists. For most teams, centimeter-level precision was something they wanted, but couldn’t justify. That barrier is now disappearing.

A clearer way to see GEODNET’s impact is through operators already using it in production. A good example is Nine Ten Drones, a drone services business run by Paul Rossi. Like many operators, Rossi saw the value of drones. Large-scale inspections that once took days could be finished in hours. Earthworks could be measured precisely enough to avoid disputes. Designs could be checked against real terrain without the cost and friction of traditional surveying. People saw the value of drones in time saved and better decisions on the ground.
But as the applications of drones increased, one problem kept showing up again and again: accuracy. Drones are only as useful as their positioning data. If you can’t reliably locate the aircraft, or trust the imagery it produces, the value of the work starts to erode quickly.
In practice, the difference came down to corrections. One of Rossi’s customers, NC Remote Sensing, runs UAV-based LiDAR mapping. Before using GEODNET, their workflow involved hours of post-processing after every flight: cleaning, correcting, and aligning point clouds to compensate for positioning drift. With real-time RTK corrections in place, much of that work simply disappears. The data comes off the drone sharper, better aligned, and ready for analysis without extra steps.
As Rossi put it, the difference between good data and great data often comes down to the corrections. Getting it right the first time saves hours on every project.
This is why I wanted to focus on GEODNET here. I genuinely believe drones fall short of their purpose if they don’t have a precise, reliable sense of where they are in space. Without that foundation, autonomy weakens, data loses trust, and the promise of drones, as tools that extend human reach and reduce risk, starts to break down. GEODNET isn’t solving every problem in robotics, but it’s addressing one of the most fundamental ones: giving machines a dependable understanding of position in the real world.
LayerDrone: Making High-Resolution Imagery Practical at Scale
Knowing where a drone is only solves half the problem. The other half is knowing what the world around it actually looks like, and how often that picture changes.
For a long time, most aerial imagery came from satellites or manned aircraft. Satellites are great for global coverage, but their images are relatively low resolution and updated on fixed, unpredictable schedules. Manned aircraft can capture high-resolution imagery, but they’re expensive, slow to mobilize, and impractical for small areas or frequent updates. In practice, each approach makes a tradeoff: satellites sacrifice detail for coverage, aircraft trade speed for cost.

Drones changed that by making high-resolution imagery cheap and fast, but introduced a new problem. Most drone imagery is collected for a single job, by a single operator, and then stored in isolation. The data is accurate, but fragmented. Independent flights deliver precision, but little reuse. Once the job is done, the imagery rarely gets updated unless someone pays to fly the site again.
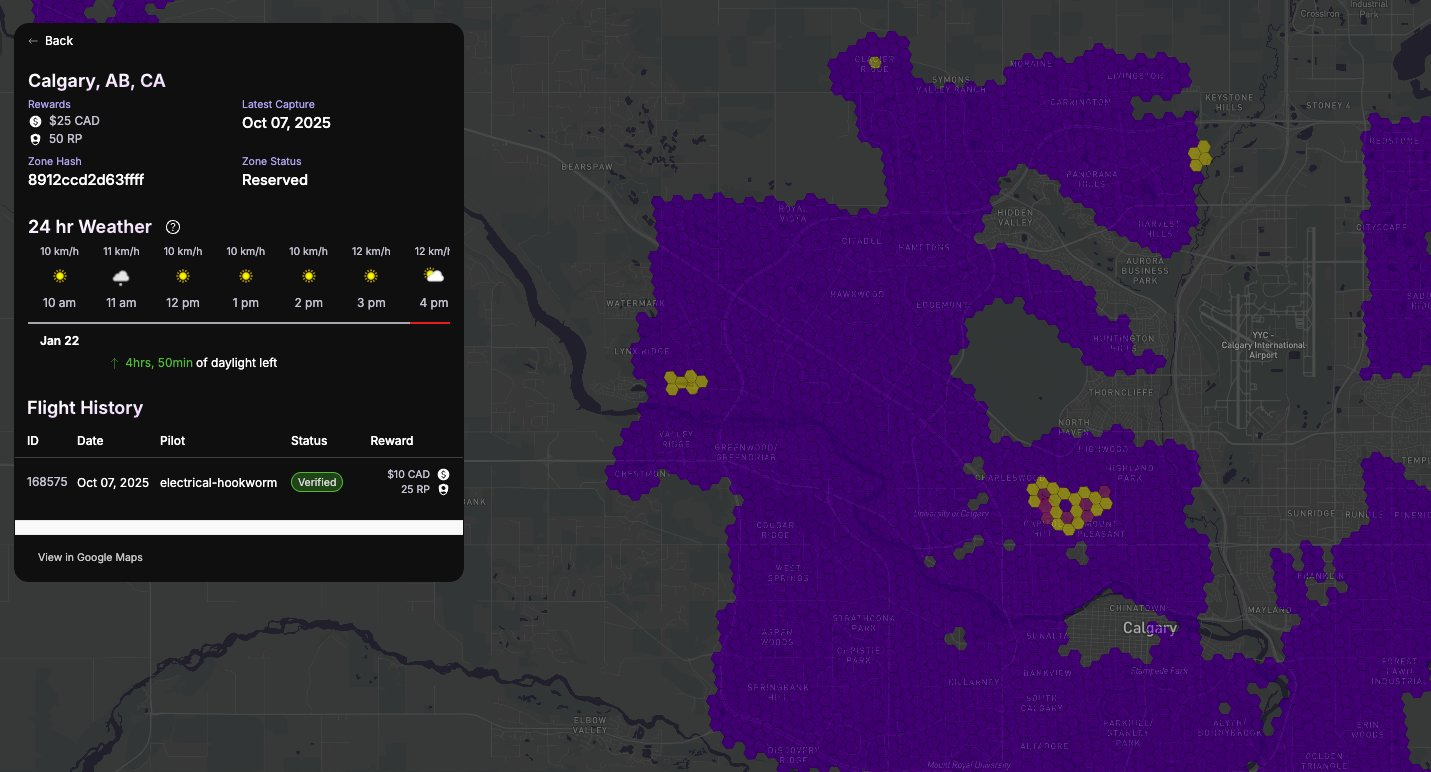
LayerDrone exists to solve that gap. LayerDrone’s approach is to standardize and aggregate drone imagery so it can be used consistently, over time, and at scale. Instead of relying on a single source, it combines many small, standardized drone captures into one system. A concrete example of this in practice is Spexi, a platform built on top of LayerDrone that coordinates thousands of drone pilots to capture standardized, on-demand imagery across cities worldwide. Spexi turns individual flights into continuously updated datasets, delivering high-resolution maps in days rather than weeks.
At a high level, LayerDrone delivers:
~900x more detail than satellite imagery
~200x faster turnaround than manned aircraft
~50x lower cost than traditional aerial mapping
They achieve this by standardizing how imagery is collected. The Earth’s surface is divided into uniform 25-acre hexagons, called spexigons. Each spexigon follows the same capture specifications, which makes imagery consistent and comparable over time. As of April 2025, the network has covered more than 100,000 spexigons, representing over two million acres of high-resolution imagery.
Drone pilots are the engine of the network. They open an app, pick a capture mission, fly a standard route, upload the imagery, and get rewarded. Each flight doesn’t just serve one client, it updates a shared visual layer that everyone can build on.
That matters because the world changes faster than traditional maps can keep up. Satellites update slowly and at low resolution. Manned aircraft are expensive and hard to schedule. Meanwhile, roads change, construction progresses, disasters reshape terrain, and cities evolve in real time.
LayerDrone’s goal is to stop treating drone imagery as one-off snapshots. By coordinating how data is collected and rewarding frequent updates, it turns simple drone flights into shared infrastructure that produces a living, high-resolution map that actually keeps pace with the physical world.
So far, we’ve looked at why precise location matters for drones, and how drones are increasingly used to capture and understand the physical world through imagery. But before any of that can happen in the real world a drone has to be capable enough to operate safely and reliably in the first place.
That capability doesn’t come from deployment alone. Drones can’t be trained by trial and error in live environments where mistakes mean crashes, damage, or risk to people. Instead, they learn and improve in controlled environments, simulations, before they ever leave the lab.
But this raises a practical question. How do you actually scale drone training? How do you let motivated builders and enthusiasts train, test, and improve drone behavior without putting real machines, or people, at risk? And just as importantly, how do you align incentives so people want to participate?
Swarm Subnet: Learning to Fly Without Crashing
Swarm Subnet approaches drone training as a shared, simulation-first problem rather than a closed, in-house process. Through its Simulation League, instead of a single organization quietly training one model behind closed doors, Swarm opens training up to a global environment where autonomous flight policies are tested against the same set of missions, side by side.
Teams begin by defining a real drone platform: it’s airframe, sensors, and operating constraints, along with the kinds of missions it needs to survive: routes, obstacles, weather, and no-fly rules. Swarm handles the simulation setup and evaluation metrics. Developers submit flight models into the Simulation League, and those models are scored automatically based on how they actually perform. Over time, the ones that fly better rise to the top, and the ones that don’t quietly fall away.
Swarm is built on Bittensor, which simply means people are rewarded for results, not credentials. If a flight model performs better under the same conditions, it earns more. If it doesn’t, it fades out. Over time, this creates a natural filter where useful behavior survives and weak approaches don’t, without a central team deciding what “good” looks like.
The practical benefit is coverage. Instead of one team guessing which edge cases matter most, models are exposed to thousands of different scenarios in parallel: bad weather, sensor noise, unexpected obstacles, or degraded inputs. By the time a model reaches real hardware, many of those failures have already surfaced in simulation. From there, real flight data is used to fine-tune behavior, not discover fundamental flaws.
Swarm also changes where intelligence lives. The models are meant to run onboard the drone, not in a distant cloud. That means a drone can keep flying and making decisions even when connectivity drops or cloud services go down. Updates and improvements sync back to the network when possible, but the drone doesn’t depend on a live connection to stay operational.
This matters because drones are no longer confined to experiments or niche deployments. The commercial drone market is projected to reach $65.25 billion by 2032, with drone delivery alone growing rapidly and the FAA expecting over one million commercial drones in operation within the next few years. We need more reliable drones if we are going to allow them into our lives.
Other Critical Layers in the Drone Stack
The projects discussed in depth so far: GEODNET, LayerDrone, and Swarm Subnet, sit at the core of the drone stack. They address where a drone is, how it understands its environment, and how it learns to behave safely. But once drones leave controlled settings and operate in the real world, additional constraints begin to dominate.
One of the first is connectivity. Precise positioning and accurate maps mean little if a drone can’t stay connected as it moves through different coverage zones. Staex approaches this by treating connectivity as infrastructure rather than a single network, allowing drones to maintain secure links as conditions change. Connectivity alone, however, isn’t enough. Drones increasingly exchange data not just with operators, but with other machines. Neuron focuses on that exchange, emphasizing verifiable, trustworthy data between systems over sheer speed.
As drones begin to share airspace with people and infrastructure, visibility becomes another hard requirement. Knowing that a drone is flying is not enough; operators and authorities need to know who is flying, where, and under what authority. FliteGrid addresses this through a distributed sensor network that identifies and investigates drones that shouldn’t be present near sensitive sites. At a broader level, Wingbits places drones within the wider aviation picture by tracking aircraft and drones together, while 4D Sky concentrates on high-precision tracking at low altitudes, where urban density and regulatory demands are highest.
Even with connectivity and airspace awareness in place, large-scale drone operations introduce another question: how work itself is coordinated. Konnex approaches this by treating drone tasks as verifiable economic activity. Instead of relying entirely on human scheduling and approval, tasks can be assigned, completed, and settled based on proof that physical work actually occurred. This layer becomes increasingly important as fleets grow and coordination shifts away from manual oversight.
What It Takes for Drones to Matter
Stepping back, the pattern across all of these projects is the same. Drones don’t become useful because they can fly; they become useful when the systems around flight mature. Just as aviation safety emerged from layered infrastructure rather than individual skill, drone reliability is now being shaped by positioning, mapping, training, connectivity, visibility, coordination, and uptime working together.
This is why framing drones as “flying robots” or uncrewed aircraft systems matters. It shifts the focus away from the vehicle itself and toward the stack that makes its behavior predictable. Once drones leave demonstrations and controlled environments, the hard problems aren’t aerodynamic, but systemic. Where exactly is the machine? What does it think the world looks like? Who else is nearby? Is it connected? Is its data trusted? And is its work accountable to someone, or something?
The projects mapped in the landscape aren’t competing to build better drones. They’re filling gaps in an emerging form of physical infrastructure. Some focus on correcting location, others on keeping maps current, others on training behavior safely, maintaining connectivity, enforcing airspace visibility, enabling economic coordination, or extending endurance. None of these layers matter in isolation. Together, they determine whether drones remain brittle tools that require constant supervision, or systems that can operate reliably as part of the environment.
That distinction between a gadget and infrastructure is the real inflection point. Infrastructure fades into the background. It’s trusted not because it’s impressive, but because it works consistently enough to be taken for granted. Roads, power grids, and air traffic control earned that trust over decades by solving coordination problems at scale.
Drones are now approaching a similar transition. The question is no longer whether they can fly, but whether the surrounding layers are strong enough for them to be embedded safely into daily life. There isn’t going to be one moment where everything suddenly works for drones, like a eureka moment. What matters is whether these layers actually come together in practice, flight after flight.
About Conglomerate
Conglomerate is a seasoned content writer and KOL in the crypto x AI x robotics space. Web3 gaming analyst, core contributor at The Core Loop, and pioneer of the onchain gaming hub and Crypto AI Resource Hub.
Book A Call
Curious how robotics and AI can drive your next growth wave? Let’s talk. Book a call with Crescendo’s CEO Shash!