

Robotics Is Having Its Homebrew Computer Club Moment

Introduction
The early days of robotics feel a lot like the early days of computing.
When computers first arrived, they weren’t personal tools. They were enormous, expensive machines sealed inside universities and government labs. A single mainframe cost millions, and using one required special training. For most people, computers were hard to explore, and they had to observe from a distance. But people who were curious, stubborn, or simply tired of being shut out began finding ways to participate.
Students learned to access million dollar computers in short time slots. Teachers pushed for computers in classrooms long before it was common. And a small group of hobbyists formed the Homebrew Computer Club, a place where anyone could bring whatever they had: unfinished experiments or circuit boards, simple ideas, or just curiosity, and learn from each other.
A club? Sounds like the kind you chose back in school based on whatever interested you, right? That’s actually close. Clubs are usually built around a shared vision, and people join because they care, not because they expect something in return. The founders of Homebrew wanted exactly that: a regular, open forum where anyone could show up and work on the idea of making computers accessible to everyone.
They shared everything openly, and even allowed regular people to experiment with powerful technology. This helped ignite the personal computing era.
The pattern is familiar: computing only transformed once it slipped out of institutional control and into the hands of everyday builders.
And the parallels to democratizing robotics are striking. Democratizing robotics is simply repeating computing’s journey, which is taking something rare and institutional, and reimagining it as personal, hackable, and fun.
You can’t expect robotics to move forward if only a few people get to touch it.
So it’s no surprise that a new effort has emerged: the Homebrew Robotics Club, a modern attempt to do for robots what the original Homebrew Computer Club once did for personal computing.
The Homebrew Robotics Club
The Homebrew Robotics Club is an indie robotics group aiming to make robotics development accessible by promoting open-source tools and building affordable hardware. Their goal is simple: remove the barriers that keep ordinary people from experimenting with robots.
Everyone already understands why robotics is a major narrative today. Beyond the massive market projections, the political signal is now unmistakable. Just recently, the U.S. administration announced a strategic shift toward robotics, going “all in” after the AI wave and triggering a frenzy across X and tech circles.


Given these signals, it’s worth examining why a community-led movement like the Homebrew Robotics Club matters right now. They are attempting something similar to what the original Homebrew Computer Club did in the 1970s: take a powerful, inaccessible technology and open it to everyday builders. That early computer club, made up mostly of hobbyists, famously became the launchpad for Steve Jobs and Steve Wozniak, who brought an early Apple I prototype to the group before Apple even existed.
Homebrew Robotics Club’s vision follows the same spirit. They want robotics to be something anyone can engage with: enthusiasts, students, researchers, or simply curious beginners. When more people can build, test, and experiment, the entire field moves faster. More ideas surface. More problems get solved. And breakthroughs no longer depend solely on big labs or large budgets.
Staying true to the ethos of the original club, they focus on lowering the cost of innovation through open-source software libraries and advocating for hardware that’s inexpensive, repairable, and customizable.
So the natural question becomes: what exactly is the Homebrew Robotics Club building, and how are they making robotics easier for everyone to explore?
Apps in Homebrew
I’ve always wondered if there was a way to take back the hours I lose to small, repetitive tasks: preparing meals, cleaning my room, walking my dogs. None of these jobs are difficult, but they stack up, especially when you’re juggling work, hobbies, and everything else life demands.
So the idea of a robot that could learn my routines, almost like a second version of me, feels less like science fiction and more like something I’d genuinely want in my home.
This is exactly the angle the Homebrew Robotics Club is taking. Their belief is simple but powerful: the real moat in robotics isn’t hardware, it’s apps.
A robot that can perform real tasks creates real economic value. In fact, if a home robot could reliably take on a meaningful set of chores, the estimated savings come out to about $26,843 per household per year. That number combines the cost of outsourced help and the value of the time you’d get back. Who would’ve thought that robots aren’t just “cool gadgets” but are actually “time-saving machines with real financial impact.”



Homebrew is already building toward that future. They’ve launched several early applications: BrewPay, Brew MCP Server, and an upcoming VR control module, all sitting on top of their “application layer” for humanoids.
BrewPay: Giving Robots the Ability to Pay
BrewPay is a microtransaction protocol that lets robots make on-chain payments through simple voice commands. It runs on the x402 payment standard, a protocol Homebrew uses to enable machine-to-machine transactions, without a human approving each step.
This is one of Homebrew’s core products going forward. BrewPay sits at the center of robo-commerce, a valuable and largely unexplored segment where robots transact for services, labor, and resources. As a first mover, Homebrew is building BrewPay as a third-party integration that robot OEMs can adopt, rather than reinventing payments themselves.

V1: Robots Paying for Things (September 2025)
In the first version, BrewPay gave robots the ability to pay for items or services in the physical world. A robot could scan a QR code tied to a crypto wallet and complete a payment through a voice command.
Example: a robot pays a store for an item, or settles a transaction with another robot.
This proved a simple but important point: robots can independently complete real-world payments.
V2: Robots Charging for Actions (November 2025, stealth)
V2 expanded BrewPay from payments into paid robotic actions. With a small x402 hardware node installed, robot owners can set prices for specific tasks their robot is willing to perform.
Example: a robot charges a small fee to perform a dance today, or in the future, to deliver a product. The robot listens for a request, waits for payment, and only then executes the task.
This turns robots into rentable workers that can be hired by humans, software agents, or even other robots.
V3: Routing Work to Robots (Beta)
V3 connects everything into a task marketplace. Instead of paying a specific robot, a user requests a task, sets a price, and available robots compete to do the job.
Example: a user requests an item to be picked up from a nearby store. The system checks which robots are online, considers distance, and routes the task to the most suitable one.
At this stage, BrewPay starts to look like infrastructure for robotic labor on demand.
Future upgrades extend BrewPay beyond basic payments and task routing into a more flexible execution and coordination layer. Planned additions include
Dynamic pricing and auctions
Integration with the x402 Bazaar, and
More granular execution controls such as GPS gating and location whitelisting.
Support for ROS 2, broader OEM integrations, and a drag-and-drop visual interface for automating tasks, bidding, and payments are also in progress.
Importantly, this is not conceptual. Large portions of this system have already been built and tested on smaller robots, and the same architecture is designed to scale to larger, mainstream robot models being released next year.
Why does this matter?
Because robots can’t walk into a bank and open an account. They don’t have passports or IDs. But they can have an on-chain identity. Blockchain gives robots a secure, verifiable way to pay for what they need: electricity, data services, maps, or even a quick charge at a station.
Humans already do this: we pay for internet, electricity, data, tools, subscriptions; the inputs that make us smarter and more capable. Robots need the same inputs. If they can’t transact, they can’t operate independently.
A robot that can pay is a robot that can maintain itself.
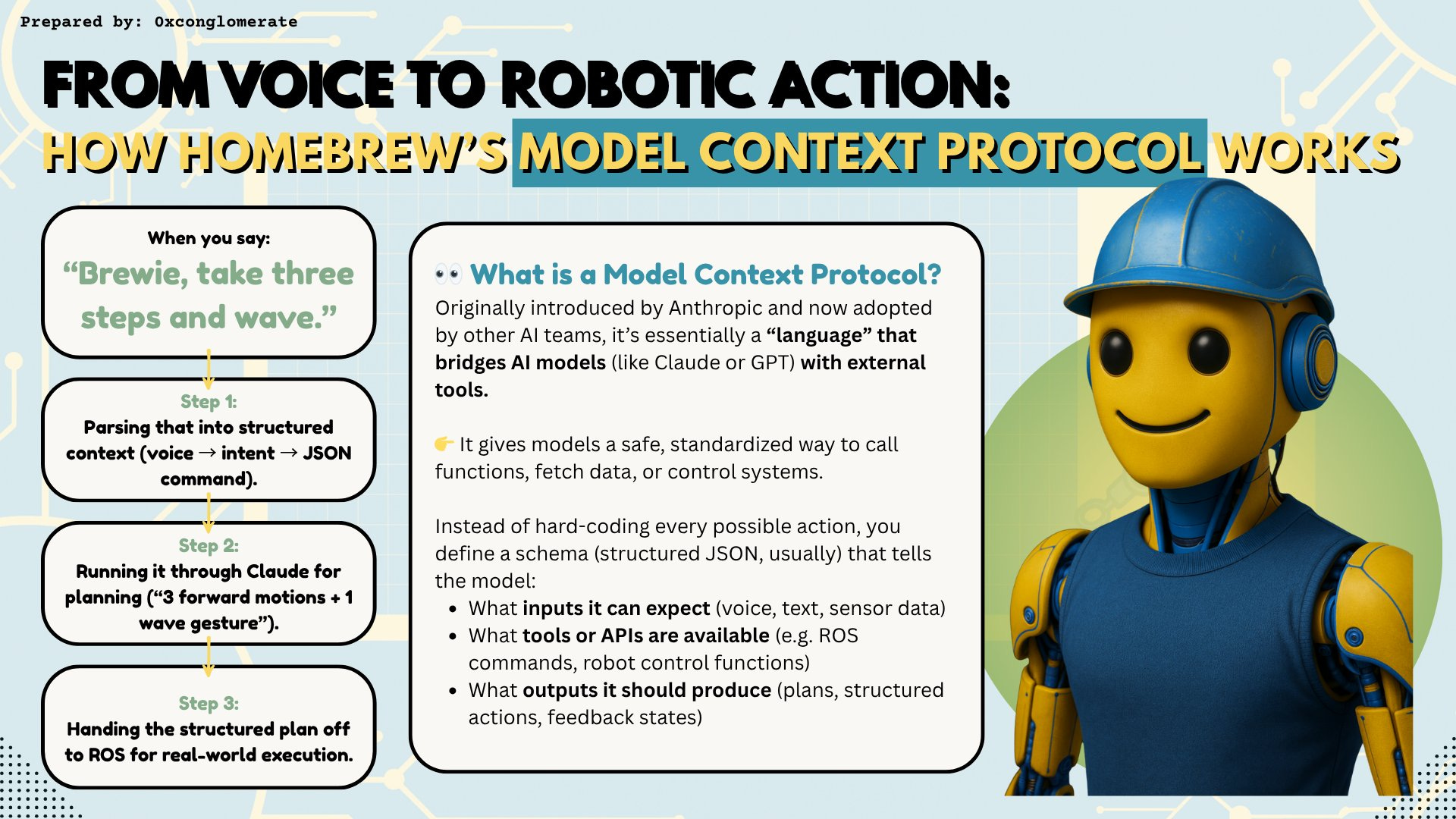
Brew MCP Server: Voice → Action
Building BrewPay naturally led to their second tool: the Brew MCP Server, the layer that turns voice into a full control interface. Homebrew believes voice will be the main UI/UX for robots, not consoles, not joysticks, not command lines. Just natural speech.
Here’s how it works:
You speak a command.
MCP verifies your voiceprint for security, making sure the robot follows only authorized users.
If the voiceprint matches, MCP parses the instruction using an LLM, breaking the sentence into clear action steps.
MCP then orchestrates the ROS modules required to execute the task: navigation, manipulation, grasping, path planning, and more.
Because BrewPay is integrated directly into MCP, payment becomes just another callable module. So a request like “Brewie, buy a Coke” triggers an entire chain of orchestrated skills:
navigate to the machine
locate the product
position the arm
grasp and retrieve
execute payment via BrewPay
return to you
Nothing executes unless MCP approves, which makes it both a command center and a safety layer.
And importantly, MCP isn’t limited to payments. It is a general-purpose “voice-to-action” engine capable of stitching together whatever modules a complex task requires. As long as a skill exists in the robot’s library, MCP can call it, making voice the simplest and most intuitive way to drive robot behavior.
Why an App Store for Robots?
Humanoid robots have limited abilities out of the box. To give them new skills, someone needs to train those behaviors, often through a mix of simulation and real demonstrations. That training has to be repeated for every robot type, because each model has its own mechanics.
This is exactly why Homebrew is pursuing an “app store” model.
Robot skills should be: created once, published, shared, sold, updated over time. Just like apps on a phone.
They’ve already said they plan to launch a full store where developers, Homebrew and third-party builders, can publish task modules that anyone can install on their robot. And all of this stays aligned with their open-source philosophy.
VR Control: Teleoperation as Training
Homebrew has also been experimenting with VR teleoperation. One early demo was a battle-royale scenario where anyone could control a robot through a browser and perform basic actions.
Their next step goes much further: a Meta Quest VR module that lets a person anywhere in the world step “inside” a HiWonder robot, moving as it moves and seeing what it sees. With just a headset and an internet connection, anyone can teleoperate the robot in real time.
Beyond the remote control, there’s an even deeper implication with the training data.
Every time a human operates the robot in VR, they’re naturally demonstrating correct motions, timing, and decision-making. These sessions are recorded and uploaded directly to Hugging Face, where they can be used to train better models. It functions similarly to platforms like phospho.ai (which charges ~35€/month), but Homebrew’s approach is tailored for open robotics and hands-on skill creation.
There’s an added twist: Homebrew is exploring token incentives for people who contribute training data. The more useful demonstrations someone provides, the more they could potentially earn, turning teleoperation into a participatory training ecosystem.
It’s the closest thing to teaching a robot the way you’d teach a child: not by describing a task, but by showing it, again and again.
Coordinating Value in an Open Robotics Ecosystem
There is an important difference between what the original Homebrew Computer Club had in the 1970s and what the Homebrew Robotics Club has today. Back then, hobbyists could freely share ideas, schematics, and code, but there was no native way to coordinate value, reward contributors, or sustain collaboration beyond goodwill and personal effort. Progress depended heavily on informal trust or, eventually, centralized companies. That model worked for early computing, but it also concentrated control and slowed experimentation once systems became more complex.
Robotics faces an even bigger version of this problem. Robots are expensive to build, hard to train, and costly to improve. When development becomes centralized, progress bottlenecks quickly. Open and decentralized approaches tend to work better, but until recently, there was no practical way to coordinate incentives at scale without recreating the same central points of control.
This is where the Homebrew Robotics ecosystem diverges meaningfully from the past. $BREW provides a native coordination layer that did not exist in the original Homebrew era. It powers how value moves through the ecosystem and allows people to build, share, and improve robot capabilities without relying on a single company to own the platform or decide who benefits.
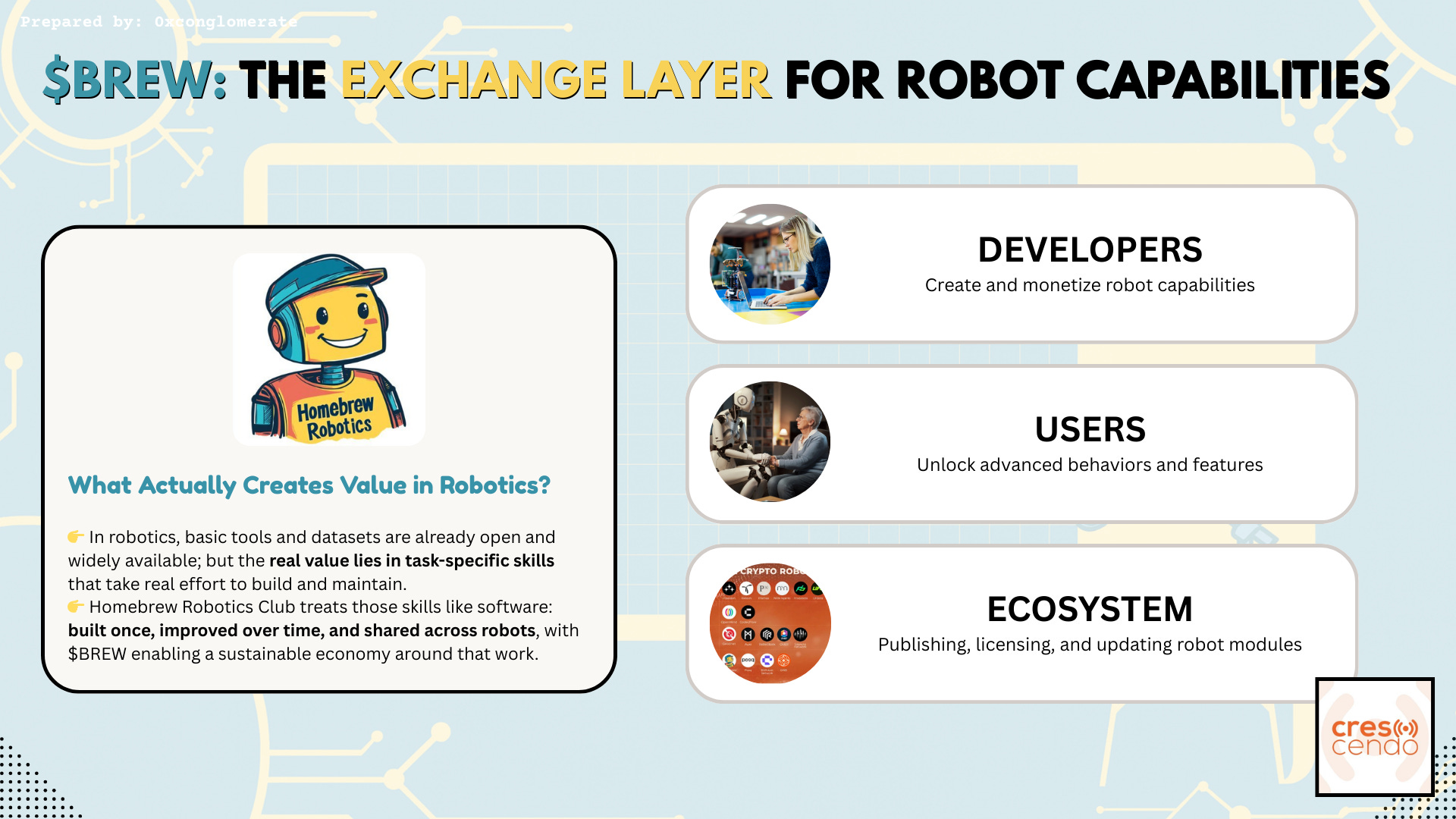
This mirrors how real value already forms in robotics today. Open SDKs and basic datasets are widely available and often free, as seen with platforms like Unitree’s open-source releases. But function-specific skills: the behaviors that allow a robot to perform useful tasks in the real world, require meaningful effort to create and maintain. Homebrew treats those skills like software: built once, improved over time, and optionally monetized. $BREW is what makes that developer economy sustainable.
The token also extends beyond modules into daily robot operation. BrewPay transactions can be settled in $BREW, certain task executions can require it, and feature access can be tied to it. Over time, this positions $BREW not just as a marketplace token, but as the native currency of the Brew application layer, used whenever robots interact with services, data, or capabilities.
$BREW also underpins the data loop. Robot owners and developers can sell sensor data, training sets, or models, while others can purchase that data to improve performance, personalization, or research. This becomes especially important with VR and simulator-based teleoperation. When someone demonstrates a task in VR, they are generating high-quality training data. That data can be reused, refined, and shared, creating value for both the contributor and the broader ecosystem. $BREW acts as the incentive and settlement layer that makes this exchange practical.

Together, these interactions form a simple flywheel. Developers publish modules. Robot owners use them and generate data. That data improves models and behaviors. Better modules attract more users and builders, increasing activity across the ecosystem. As participation grows, $BREW becomes more embedded in the workflows that matter.
The result is an economy where value comes from utility, rather than hype. As more people build robots that actually do things, the token naturally moves alongside that activity. In that sense, $BREW is not trying to manufacture demandit exists to coordinate and sustain the work that builders are already motivated to do.
Partnerships and Funding
Beyond the demos and the roadmap, there’s a more fundamental question to ask: who is actually building the Homebrew Robotics Club, and do people believe in what they’re doing?
The team is small, but highly technical, which is exactly the kind of group you’d expect to push an open-source robotics movement forward.
A senior robotics engineer with seven years of hands-on experience in industrial automation and R&D, having shipped three full robotics projects end-to-end.
Two robotics engineers working under him, both with strong hardware backgrounds and experience competing in international university robotics competitions.
A head of product with a computer science degree and previous PM experience at a hardware energy startup valued above $50M.
CEO has a statistics background, fintech product experience, and relationships with major robotics OEMs.
One detail that says a lot about their culture: they’re hiring directly from the community. A user who experimented with their web-based control module ended up building extra features himself, including an on-chain betting layer for the Battle Royale demo, and the team is now bringing him onboard. It’s a small example, but it reflects their core philosophy: if you contribute, you’re part of the movement.
As for funding, nothing public has been announced yet. In a recent Q&A, the team mentioned they have enough runway for more than a year, which gives them room to focus on what actually matters at this stage: proving that their approach works. They’re not optimizing for fundraising headlines, they’re building product first.
Homebrew Robotics Club operates primarily through a fair-launched crypto token model rather than traditional VC funding. They launched their $BREW token with the following allocation:
70% to the community.
15% to the ecosystem (with linear vesting over 1 year for marketing, builder grants, and liquidity provision, locked via Streamflow).
15% to the team (with a 1-year cliff and vesting over 12 months, locked via Streamflow).
Their longer-term direction is clearer than most early robotics teams will admit. Homebrew wants its software and app ecosystem to sit on top of low-cost humanoid platforms that reach mainstream consumers. Whether that happens through partnerships or a future acquisition isn’t the point. The goal is to ensure that any affordable robot coming to market can run a library of useful, installable skills out of the box.
One major robotics company they’ve spoken with already operates a private “app store” for a limited group of clients. The idea exists behind closed doors; it just hasn’t been brought to the broader market yet. Homebrew wants to be the group that brings that to the masses.
The Homebrew Moment for Robotics
Robotics today is still expensive, technical, and mostly built for labs, factories, and well-funded companies. Homebrew Robotics Club exists for the same fundamental reason the Homebrew Computer Club once did: to move powerful technology out of closed institutions and into the hands of everyday builders. That shift changed computing. Robotics now stands at a similar point.
If computers had stayed inside universities, most modern software would never have been written. Robotics faces the same risk. Progress doesn’t accelerate because a few organizations move faster. It accelerates when many people are allowed to build, test, and improve together.
What makes Homebrew different is not the idea of openness alone. It is the practical system they are building around it. Their app store turns robot behaviors into reusable software. BrewPay gives robots the ability to pay for services and resources on-chain. MCP transforms voice into executable tasks. VR control turns human operation into training data. Each piece removes friction that normally keeps robotics expensive and slow.
Together, these tools move robotics closer to something people can actually use, modify, and improve, not just study.
If robotics were widely accessible rather than tightly controlled, development would move differently.
And that raises a simple question: what would people build if robots finally became something they could work with directly?
About Conglomerate
Conglomerate is a seasoned content writer and KOL in the crypto x AI x robotics space. Web3 gaming analyst, core contributor at The Core Loop, and pioneer of the onchain gaming hub and Crypto AI Resource Hub.
Book A Call
Curious how robotics, gaming, and AI can drive your next growth wave? Let’s talk. Book a call with Crescendo’s CEO Shash!